
Trial 1
UMI-3D
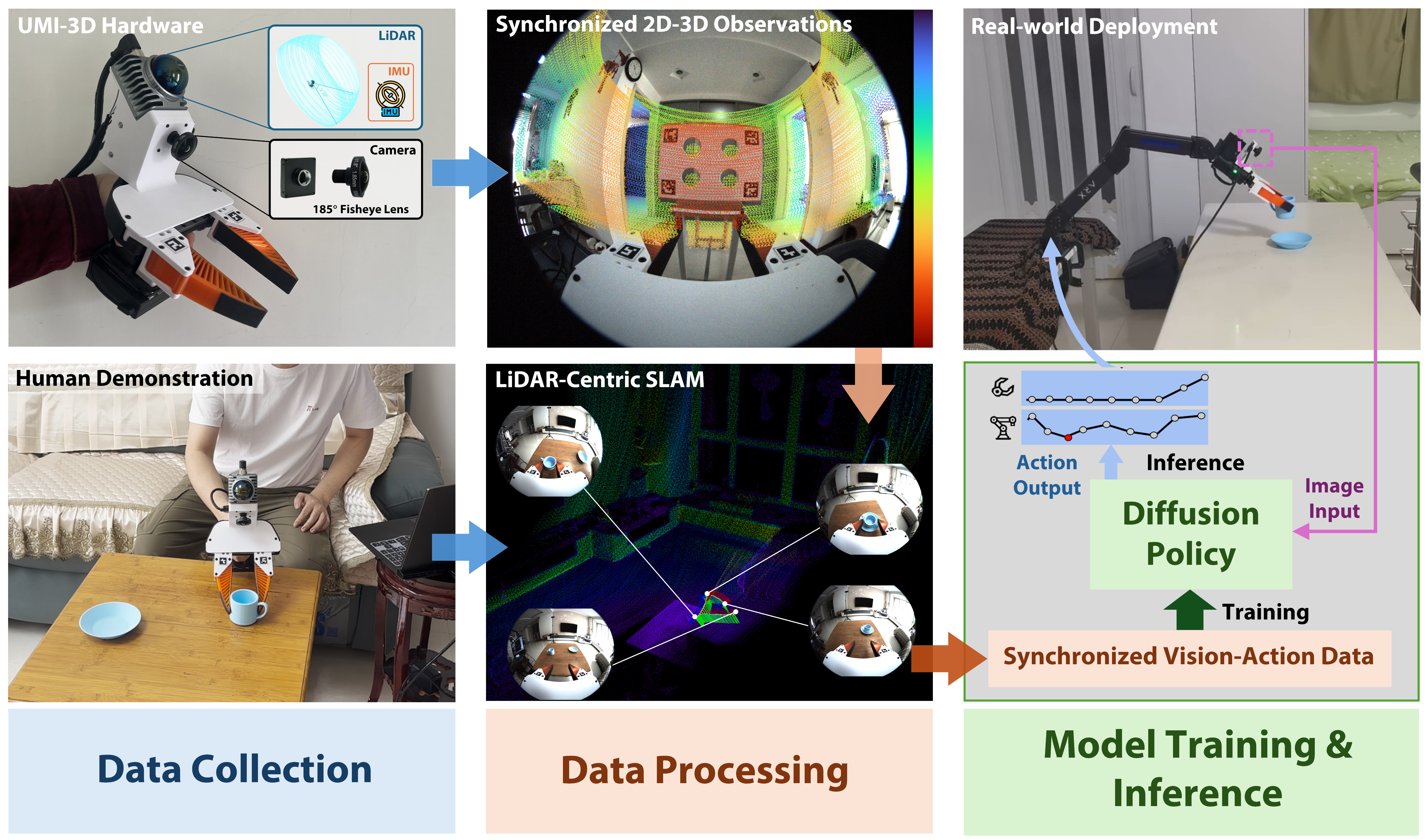
Extending UMI from Vision-Limited to 3D Spatial Perception
When Vision Fails,
LiDAR Takes Over.
Cost < 5000 RMB (700 $).
Robust SLAM.
No External Infrastructure.
Unfazed
by Occlusion, Dynamics, and Tracking Loss.
Fully Open-Source.
Building Embodied Intelligence
at Home
.
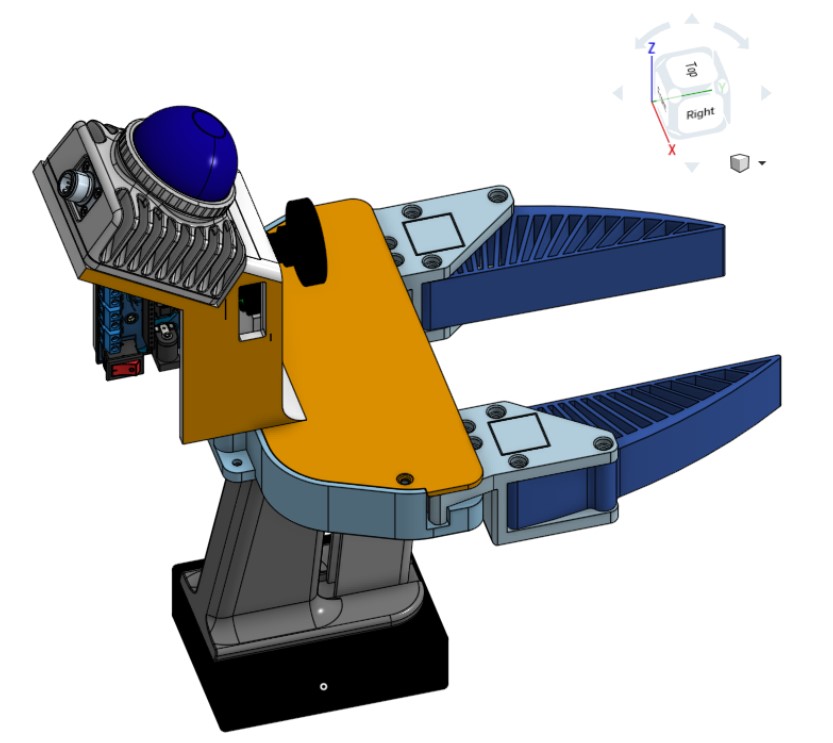
Hardware Design
Real Hardware
CAD Overview
SLAM & Data Processing
White Wall (weak texture)
Curtain (weak texture, dynamic objects, light changes)
Sliding Door (dynamic objects, light changes, precise operation)
Policy Training & Deployment
Task 1 — Cup → Saucer Placement ☕️
Training Data
All Experiments and Scores

Generalization Results
Task 2 — Curtain Pulling 🎪
All Experiments and Scores
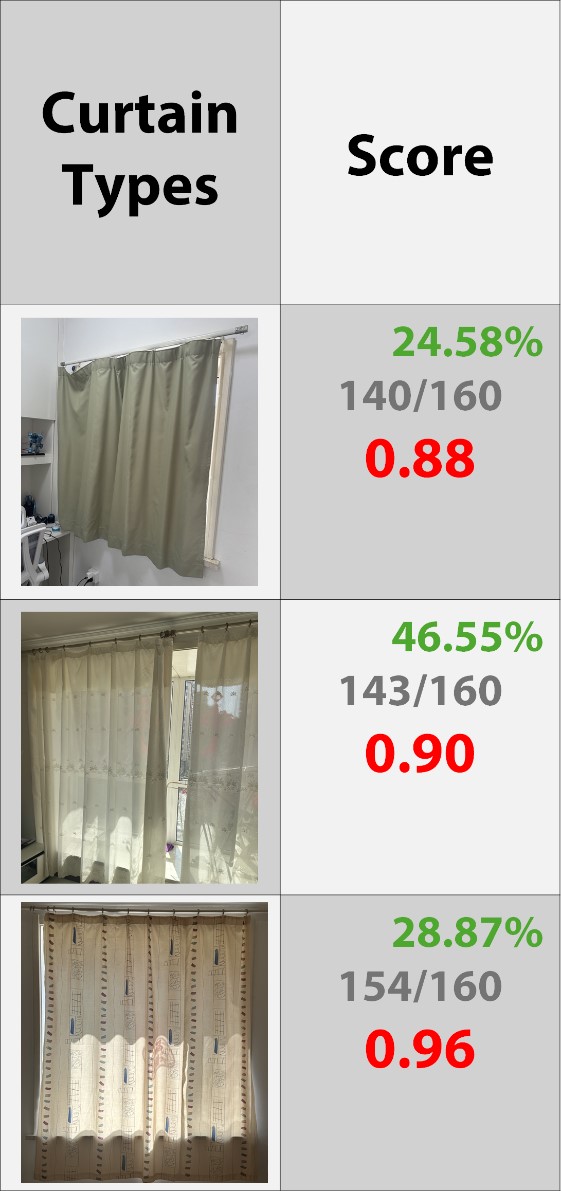
Generalization Results
Task 3 — Open Sliding Door → Grasp Cup → Place on Table 🚪☕️⛩
All Experiments and Scores
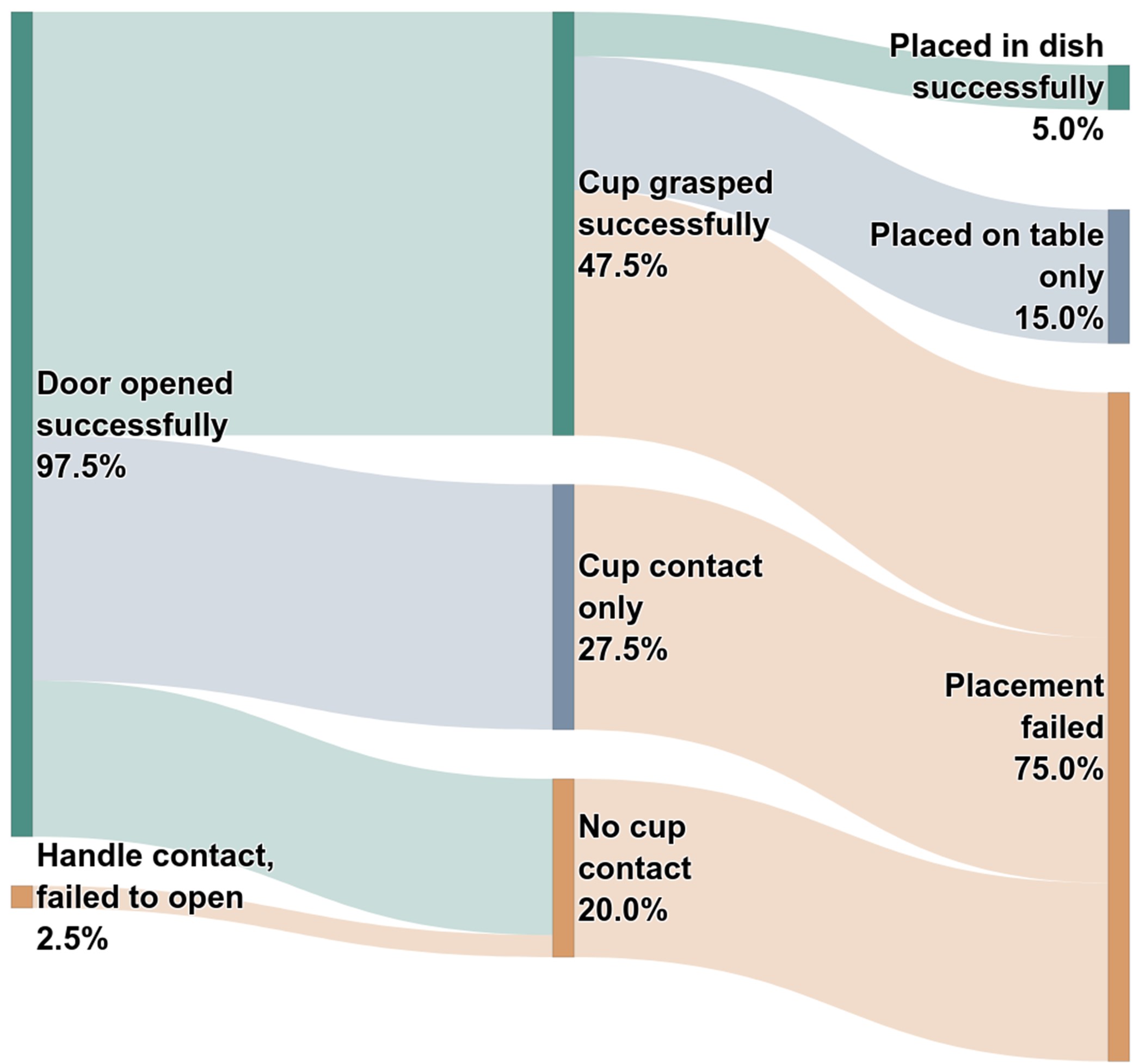
Failure Propagation
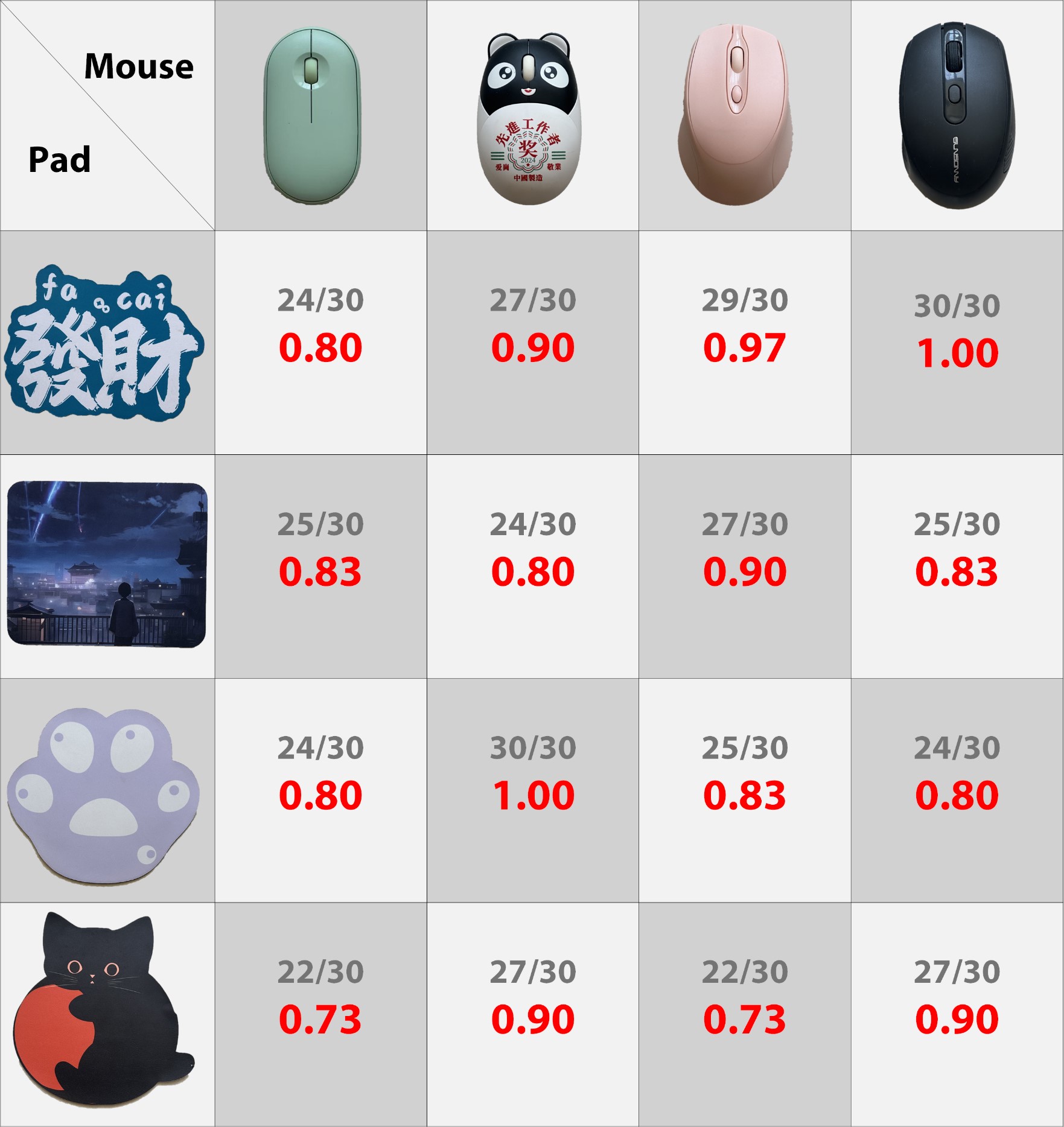
Task 4 — Mouse → Pad 🖱️ (Verify the compatibility between UMI-3D and the original UMI)
All Experiments and Scores
Generalization Results
Dataset & Models
Team

1 The University of Hong Kong 2 University of Science and Technology of China 3 Physical Intelligence Laboratory
Paper
Latest version: arXiv or here.

BibTeX
@misc{wang2026umi3dextendinguniversalmanipulation,
title={UMI-3D: Extending Universal Manipulation Interface from Vision-Limited to 3D Spatial Perception},
author={Ziming Wang},
year={2026},
eprint={2604.14089},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2604.14089},
}Acknowledgements
The author would like to thank Prof. Fu Zhang and Dr. Zhengrong Xue for their insightful and constructive discussions. The author also gratefully acknowledges Prof. Yanyong Zhang for providing essential computational resources that enabled this work.
Contact
If you have any questions, please feel free to contact Ziming Wang.
Website template borrowed from
UMI
.